Ship Inspection and Maintenance Aerial Robots for Continuous Cooperation with Humans
The SIMAR4D main ambition is to test the use of small enhanced autonomous robots supported by AI to improve working conditions and officers’ safety by complementing and supporting of remote inspection techniques (RIT) [IACS Rec. 1996/Rev.2 2016 – Guidelines for Use of Remote Inspection Techniques for surveys]. These methods are relevant for ship owners/managers, shipyards, suppliers, and flag states authorities. Robots (UAV) in the shipping inspections and maintenance sectors increase the performance of the inspection and surveying processes, data acquisition and work safety and security in difficult conditions and can advise about potential risks at work or in routinary workflows of crew members in charge of the maintenance and surveillance tasks on the ships.
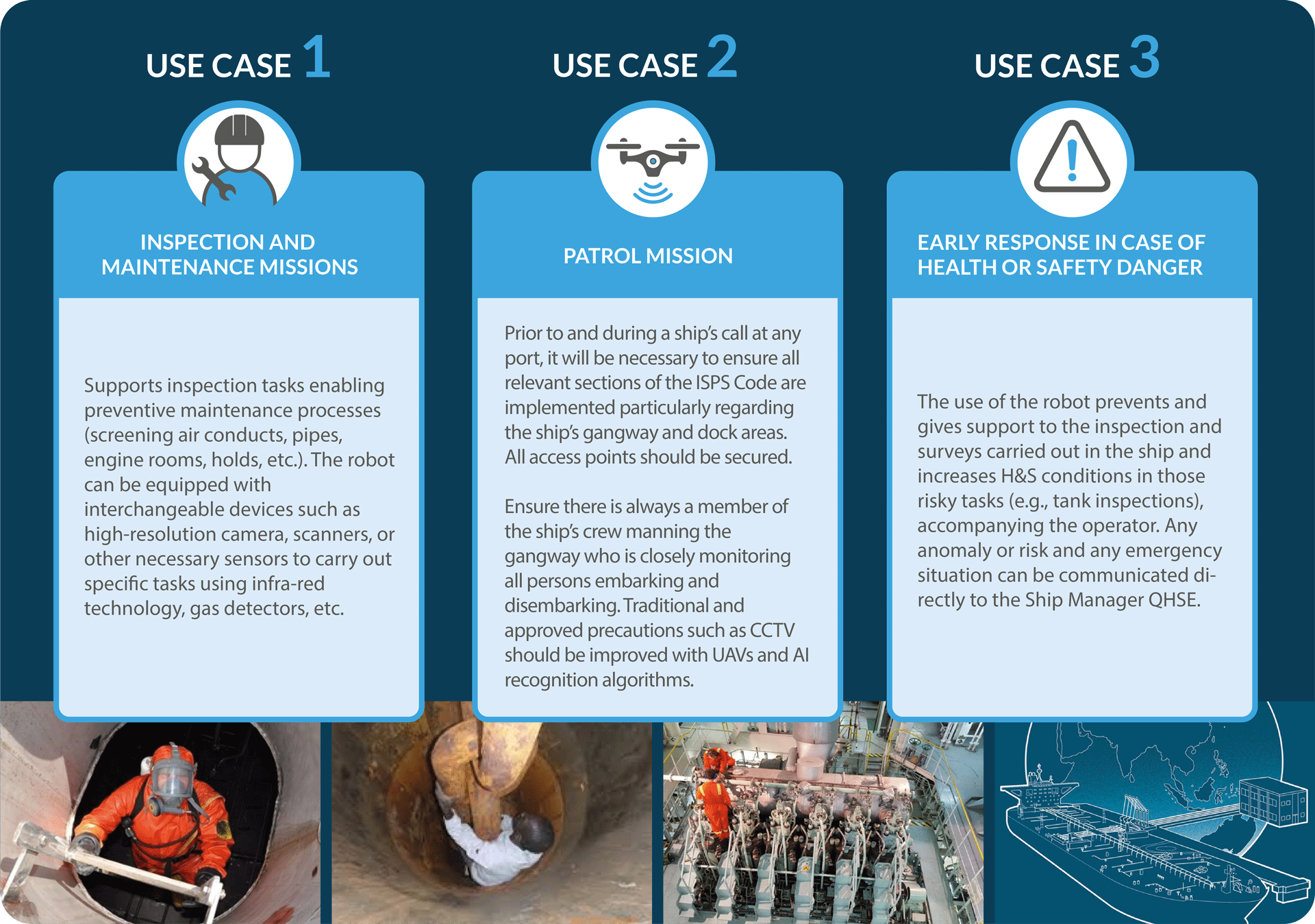
The project will focus on 3 main use cases beyond the current application scenarios (shipping company quality checks and Port State Control preparedness):
Inspection and maintenance missions – facilitate the condition-based maintenance (for the shipping company);
Patrol mission, early risk detection, and
Early response in case of health, safety danger or security threat.
Some accidents with fatal results come from unexpected situations (presence of hazardous materials and gases, bad conditions on safety, firefighting, smoke and fails of other equipment and systems that support safety of life at sea). As a result, the project will provide safe, secure, and efficient guidelines and procedures for Quality, Health, Safety and Environment (QHSE) maintenance tasks on board ships by using AI and customized unmanned vehicles to improve the performance of workers at sea and the safety risk factor (SRF) of the international commercial fleet.
HORIZON-CL4-2021-DIGITAL-EMERGING-01 –
Digital and emerging technologies for competitiveness and fit for the green deal
Infographic
Consortium
NATIONAL TECHNICAL UNIVERSITY OF ATHENS (Greece)
COMET GESINCO S.L. (Spain)
CENTRO DE ENSENANZA UNIVERSITARIA SEK UCJC (Spain)
AMERICAN MPIRO OF SIPING HELLENIC MONOPROSOPI ETAIREIA PERIORISMENIS EVTHINIS, AMERICAN BUREAU OF SHIPPING (Greece)
FRAUNHOFER GESELLSCHAFT ZUR FOERDERUNG DER ANGEWANDTEN FORSCHUNG E.V. (Germany)
CENTRE INTERNACIONAL DE METODES NUMERICS EN ENGINYERIA (Spain)